欢迎来到衡水知识产权运营服务中心!

- 400 086 6986
运营单位:河北峻熙知识产权代理有限公司
伺服电机控制方法、装置、电子设备及存储介质
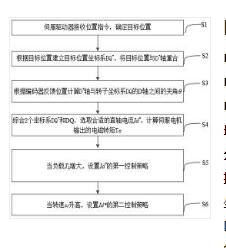
本发明公开了一种伺服电机控制方法、装置、电子设备及存储介质,该方法主要包括以下步骤:根据目标位置建立目标位置坐标系DQ*,将目标位置与D*轴重合;根据编码器反馈位置计算D*轴与转子坐标系DQ的D轴之间的夹角θ;综合2个坐标系DQ*和DQ,选取合适的直轴电流Id*,计算伺服电机输出的电磁转矩Te;当负载增大时,设置Id*的控制策略;当转速升高时,设置Id*的第二控制策略。该控制方法不用增加调节器的增益,也不用增加额外的扰动观测器,而是通过改变直轴电流Id*的大小,来增加伺服环路的抗扰性。能在低速、高稳定性要求的应用场合下实现伺服电机的高刚性控制。
本实用新型公开了一种新型背部减压适老护理床,包括床体支架,所述床体支架内部依次设有升降支架、臀部支架、腿部支架和脚部支架,所述升降支架靠近臀部支架一侧设有连接轴,所述连接轴与升降支架固定连接,所述连接轴两端分别延伸至床体支架内壁前后两侧,所述连接轴两端均固定连接有滑轮,所述床体支架内壁两侧均开设有滑槽,所述滑轮设在滑槽内部,所述滑轮与滑槽相匹配,所述升降支架底部设有固定杆。本实用新型通过升降支架在升起的同时,其靠近臀部之间的一侧可以向远离臀部支架的方向移动一段距离,使人体背部升起的同时,通过连接轴的移动使人体向升降支架方向移动,避免人体向下滑动。
相关内容
- 一种防漏气轮胎加工用的斜拉式夹盘及其夹紧方法2023-06-15
- 一种用于消毒浴缸的触发结构及使用方法2023-06-15
- 一种中央空调换热管漏点检测装置2023-06-12
- 一种便携式淋水填料2025-12-31

联系我们
电话:400 086 6986、13903282559
邮箱:hebeijunxi888@163.com
地址:河北省衡水市冀州区和平西路2号


您好,请留下您的问题及电话,稍后工作人员会与您联系。
x